Sim2Real for efficient manipulation policy training
Active📢 Stay tuned for future updates!
I’m a Master’s student in Robotics, Cognition and Intelligence at TUM, passionate about autonomous mobile robots operating in complex, unknown environments. I’m particularly interested in quadrupeds, humanoids, and hybrid robotic systems combining locomotion and manipulation or multi-modal locomotion, and exploring learning-based methods that enable robust real-world autonomy.🤖
📢 Stay tuned for future updates!

📢 Stay tuned for future updates!
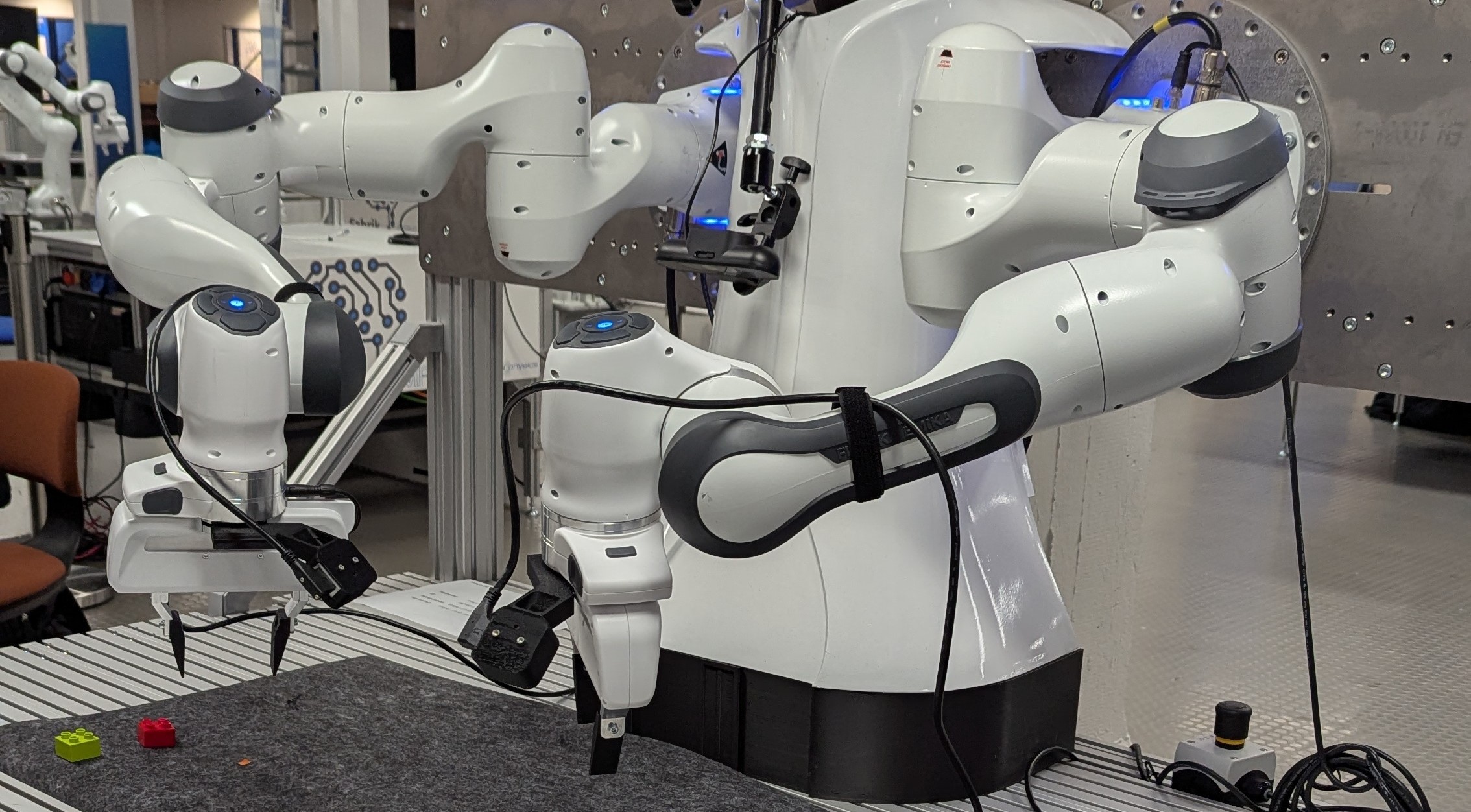
Collected human demonstrations for a LEGO Duplo stacking task using a VR-setup (Metaverse headset), learned Diffusion Transformer Flow policies based …

A transformer-based pipeline for dense and consistent 3D reconstruction from monocular RGB videos of large-scale real-world scenes.


Learning Systems and Robotics Lab (TUM)
2025 - Present
Munich, Germany
I’m working on photorealistic simulation for training robust, real-world manipulation policies and serving as a Teaching Assistant for the Advanced Robot Learning and Decision-Making course.

2022 - 2024
Abstatt, Germany
I analyzed and validated terabyte-scale ADAS test drive data, developed, debugged, and virtualized a scalable analysis tool for cloud deployment and designed and maintained CI/CD pipelines for automated testing and deployment. Thesis title: “Fusion of Video Objects and Radar Detections for Automatic High Beam”.
2021 - 2023
Esslingen, Germany
I developed Sensor Fusion, Planning, and Control algorithms in simulation for an autonomous racecar system and supervised and coordinated student projects.